تهیه اطلاعات پیوسته به روز و دقیق در مورد مکان و سرعت یک شی معین فقط به کمک توالی مشاهدات در مورد موقعیت آن شی، که هر کدام شامل مقداری خطاست امکان پذیر است. این فیلتر در طیف گستردهای از کاربریهای مهندسی از رادار گرفته تا بصیرت رایانهای کاربرد دارد. روش تصفیه کالمن یکی از عناوین مهم در تئوری کنترل و مهندسی سیستمهای کنترلی میباشد.
فیلتر کالمن (Kalman Filter) یک فیلتر بازگشتی کارامد است که حالت یک سیستم پویا را از یک سری اندازه گیریهای همراه با خطا بر آورد میکند. به همراه یک تنظیم کننده خطی مرتبه دوم (linear quadratic regulator LQR) فیلتر کالمن مسائل Gaussian control خطی مرتبه دوم (linear-quadratic Gaussian control - LQG) را حل میکند. فیلتر کالمن، LQR و LQG راه حلی هستند برای آنچه شاید اساسیترین مسائل تئوری کنترل می نامند...
کتاب نظریه و تمرین فیلتر کالمن با استفاده از نرم افزار متلب (Kalman Filtering - Theory and Practice Using MATLAB)، مشتمل بر 9 فصل، 582 صفحه، با فرمت pdf، همراه با تصاویر، به زبان انگلیسی، به ترتیب زیر گردآوری شده است:
Chapter 1: General Information
- On Kalman Filtering
- On Optimal Estimation Methods
- On the Notation Used In This Book
- Summary
- Problems
Chapter 2: Linear Dynamic Systems
- Chapter Focus
- Dynamic System Models
- Continuous Linear Systems and Their Solutions
- Discrete Linear Systems and Their Solutions
- Observability of Linear Dynamic System Models
- Summary
- Problems
Chapter 3: Random Processes and Stochastic Systems
- Chapter Focus
- Probability and Random Variables (RVs)
- Statistical Properties of RVs
- Statistical Properties of Random Processes (RPs)
- Linear RP Models
- Shaping Filters and State Augmentation
- Mean and Covariance Propagation
- Relationships Between Model Parameters
- Orthogonality Principle
- Summary
- Problems
Chapter 4: Linear Optimal Filters and Predictors
- Chapter Focus
- Kalman Filter
- Kalman–Bucy Filter
- Optimal Linear Predictors
- Correlated Noise Sources
- Relationships Between Kalman–Bucy and Wiener Filters
- Quadratic Loss Functions
- Matrix Riccati Differential Equation
- Matrix Riccati Equation In Discrete Time
- Model Equations for Transformed State Variables
- Application of Kalman Filters
- Summary
- Problems
Chapter 5: Optimal Smoothers
- Chapter Focus
- Fixed-Interval Smoothing
- Fixed-Lag Smoothing
- Fixed-Point Smoothing
- Summary
- Problems
Chapter 6: Implementation Methods
- Chapter Focus
- Computer Round off
- Effects of Round off Errors on Kalman Filters
- Factorization Methods for Square-Root Filtering
- Square-Root and UD Filters
- Other Implementation Methods
- Summary
- Problems
Chapter 7: Nonlinear Filtering
- Chapter Focus
- Quasilinear Filtering
- Sampling Methods for Nonlinear Filtering
- Summary
- Problems
Chapter 8: Practical Considerations
- Chapter Focus
- Detecting and Correcting Anomalous Behavior
- Prefiltering and Data Rejection Methods
- Stability of Kalman Filters
- Suboptimal and Reduced-Order Filters
- Schmidt–Kalman Filtering
- Memory, Throughput, and Wordlength Requirements
- Ways to Reduce Computational Requirements
- Error Budgets and Sensitivity Analysis
- Optimizing Measurement Selection Policies
- Innovations Analysis
- Summary
- Problems
Chapter 9: Applications to Navigation
- Chapter Focus
- Host Vehicle Dynamics
- Inertial Navigation Systems (INS)
- Global Navigation Satellite Systems (GNSS)
- Kalman Filters for GNSS
- Loosely Coupled GNSS/INS Integration
- Tightly Coupled GNSS/INS Integration
- Summary
- Problems
* توجه: لازم به ذکر است که علاوه بر فایل کتاب آموزشی بالا، مجموعه کدهای تخمین حالت و پارامتر با فیلتر کالمن در نرم افزار MATLAB، جهت آموزش هرچه بهتر این مبحث نیز جهت دانلود قرار داده شده است:
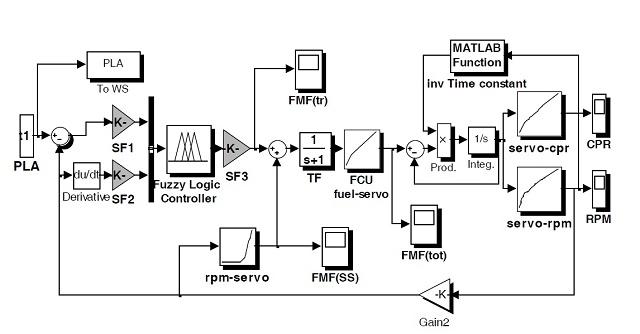
- مدل سیمیولینک و برنامه فیلتر کالمن استاندار یک بعدی 1D standard Kalman Filter (Simulink model and program)
- بسته جامع فیلتر کالمن (Kalman Filter Package)
- فایل آموزشی فیلتر کالمن در متلب Kalman Filter in Matlab (Tutorial)
- آموزش فیلتر کالمن بی رد (Learning the Unscented Kalman Filter)
- فیلتر کالمن خطی (Linear Kalman Filter)
- چارچوب فیلتر کالمن برای تخمین حالت و پارامتر در متلب (Kalman filtering framework)
- فیلتر کالمن برای رفع نویز فیلم های دارای نویز (Kalman filter for noisy movies)
- بهینه سازی کمترین مربعات غیر خطی با استفاده از تخمین پارامتر توسط فیلتر کالمن بی رد (Nonlinear least square optimization through parameter estimation using the Unscented Kalman Filter)
- یادگیری فیلتر کالمن از دیدگاه فیدبک (Learning the Kalman Filter: A Feedback Perspective)
- آموزش پیاده سازی فیلتر کالمن در سیمیولینک (Learning Kalman Filter Implementation in Simulink)
- آموزش فیلتر کالمن توسعه یافته (Learning the Extended Kalman Filter)
- فیلتر کالمن توسعه یافته دوگانه (Dual Extended Kalman Filter)
- فیلتر کالمن توسعه یافته برای داده های سیستم موقعیت دهی عمومی (Extended Kalman Filter(EKF) for GPS)
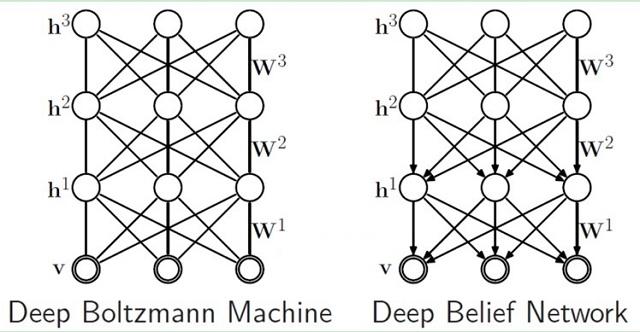
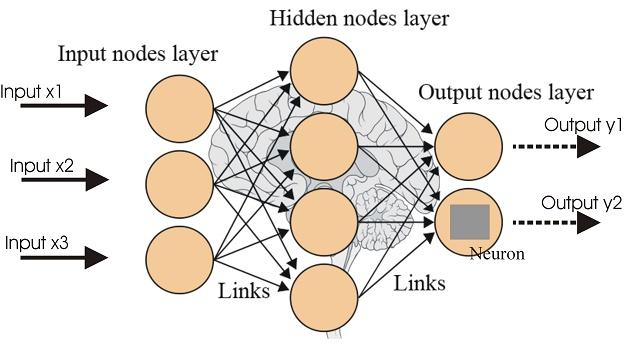
- آموزش و طراحی شبکه های عصبی مصنوعی با استفاده از فیلتر کالمن بی رد (Neural Network training using the Unscented Kalman Filter)
- فیلتر کالمن دسته ای (Ensemble Kalman Filter)
- رابط گرافیکی یا GUI برای رفع نویز سیگنال های ویدئویی و تصویری با استفاده از فیلتر کالمن (GUI for denoising video signals with Kalman filter)
- تعقیب هدف دو بعدی با استفاده از فیلتر کالمن (2D Target tracking using Kalman filter)
- تخمین یک حالت دارای مقدار ثابت با استفاده از فیلتر کالمن (Estimating a constant state using the Kalman Filter)
- فیلتر کالمن سلسله مراتبی برای پیش بینی سری های زمانی پزشکی (Hierarchical Kalman Filter for clinical time series prediction)
- آموزش و طراحی شبکه های عصبی مصنوعی با استفاده از فیلتر کالمن توسعه یافته (Neural Network training using the Extended Kalman Filter)
جهت دانلود کتاب آموزشی و مجموعه کدهای تخمین حالت و پارامتر با فیلتر کالمن در نرم افزار MATLAB بر لینک زیر کلیک نمایید:
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند
:: موضوعات مرتبط:
نرم افزار MATLAB،
آموزش ویدیویی متلب MATLAB،
کتاب و جزوات متلب MATLAB،
پروژه و مقالات متلب MATLAB،
تحقیق، مقاله، پروژه،
مهندسی رباتیک،
مهندسی صنایع،
مهندسی خودرو،
اجزاء ماشین،
نگهداری و تعمیرات،
ابزار شناسی،
پکیج ویژه و نرم افزارهای کاربردی،
پروژه،
،
:: برچسبها:
تابع اولیه گیری,
ضمنی و صریح,
بتای نیومارک,
ویلسون تتا,
تخمین تصحیح,
بردارهای سرعت و شتاب,
رفتار خطی و ناخطی,
عملکرد بهتر,
,