
|
نویسنده : www.BartarFile.ir
|

|
کتاب راهنمای کمک آموزشی هندسه ترسیمی رشته نقشه کشی صنعتی، کتابی مفید، کاربردی و کمکی از آموزش هندسه ترسیمی در نقشه کشی صنعتی می باشد. این کتاب مشتمل بر 217 اسلاید، در 13 فصل، به زبان فارسی، با فرمت powerpoint، به همراه تصاویر رنگی توسط مهندس همایون سلطانی به ترتیب زیر گردآوری شده است:
- فصل 1: اصول هندسۀ ترسیمى
- فصل 2: نقطه و مختصات آن
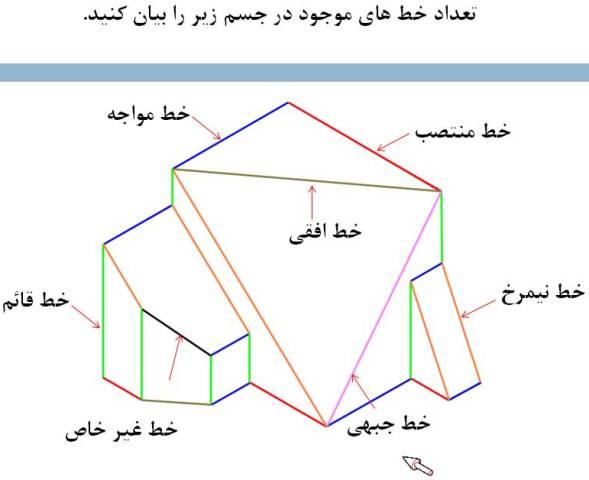
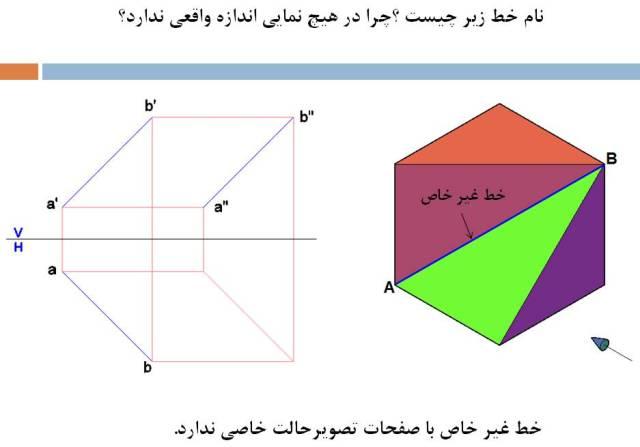
- فصل 3: خط و انواع آن
- فصل 4: صفحه و انواع آن
- فصل 5: تغییر صفحه
- فصل 6: وضعیت دو خط نسبت به هم
- فصل 7: وضعیت خط و صفحه نسبت به هم
- فصل 8: چگونگی وضعیت دو صفحه نسبت به هم
- فصل 9: دید و ندید
- فصل 10: اجسام هندسى
- فصل 11: بررسى برخورد خط، صفحه با جسم
- فصل 12: تقاطع اجسام
- فصل 13: سطوح منحنى و برش هاى اجسام
قابل توجه هنرآموزان فنی رشته نقشه کشی صنعتی هنرستان های فنی و کاردانش:
هنرآموزان فنی رشته نقشه کشی صنعتی هنرستان ها می توانند از کتاب راهنمای کمک آموزشی درس هندسه ترسیمی جهت درک بهتر هنرجویان در کلاس درس، با استفاده از دستگاه ویدئو پروژکتور و یا تخته های هوشمند به تدریس پرداخته و در نهایت هنرجویان و همچنین هنرآموز از کلاس درس حداکثر بهره را برده و باعث افزایش راندمان و بهره وری گردند.
جهت دانلود کتاب راهنمای کمک آموزشی هندسه ترسیمی رشته نقشه کشی صنعتی برلینک زیر کلیک نمایید:
:: موضوعات مرتبط: طراحی جامدات، نقشه کشی صنعتی، کلیه گرایش ها، ،











 آمار
وبلاگ:
آمار
وبلاگ: