|
نویسنده : www.BartarFile.ir
|

|
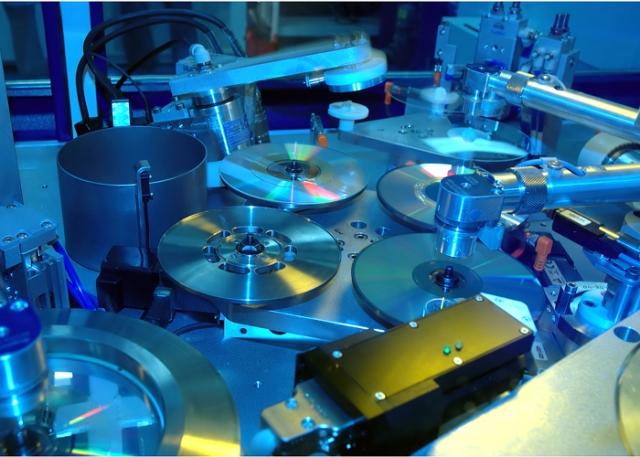
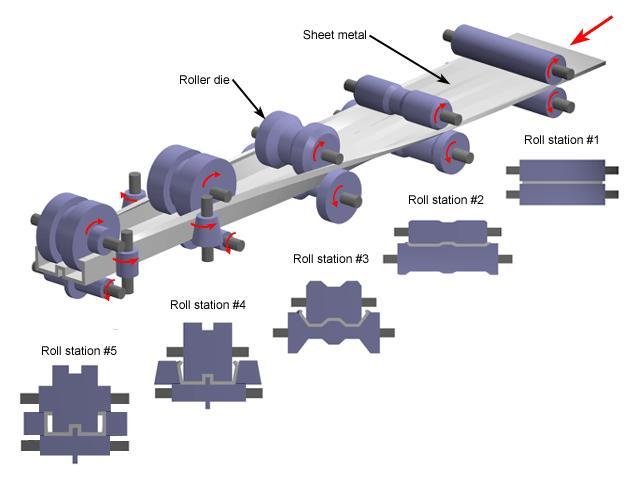
اتوماسیون در بخش های مختلف صنعت و كارهای تولیدی در چند دهه اخیر ظهور پیدا كرده است و روز به روز نیز در حال توسعه می باشد. بیش از چند دهه از ظهور كارخانجات كاملاً مكانیزه كه در آن ها تمامی پروسه ها اتوماتیك بوده و نیروی انسانی در آن نقش اجرائی ندارد، نمی گذرد. اما در چند سال اخیر شاهد بوجود آمدن كارخانجات مكانیزه ای بوده ایم كه طراحی، ساخت و نحوه كار آن ها واقعاً حیرت انگیز است. ایده و دانش كنترل اتوماتیك و استفاده از سیستم های مكانیزه در كارخانجات به جنگ جهانی دوم می رسد. اما تحولات عظیم و چشم گیر آن در سال های اخیر به وقوع پیوسته است. رُبات یا روبوت وسیلهای مکانیکی جهت انجام وظایف مختلف است. یک ماشین که میتواند برای عمل به دستورات مختلف برنامه ریزی گردد و یا یک سری اعمال ویژه انجام دهد. مخصوصا آن دسته از کارها که فراتر از حد تواناییهای طبیعی بشر باشند. این ماشین های مکانیکی برای بهتر به انجام رساندن اعمالی از قبیل احساس کردن، درک نمودن و جابجایی اشیا یا اعمال تکراری شبیه جوشکاری تولید میشوند.

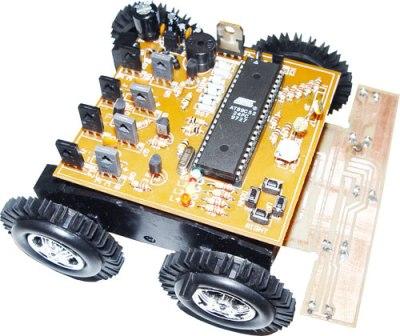
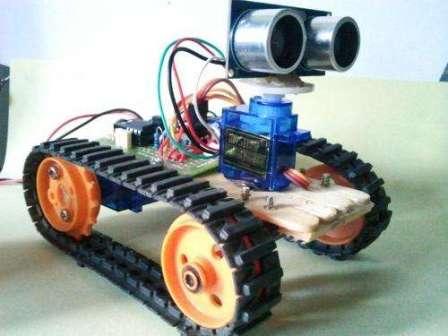
ربات مسیریاب رباتی است که می تواند در یک مسیر از قبل تعیین شده حرکت کند، این مسیر می تواند یک خط سیاه در زمینه سفید یا یک خط سفید در زمینه سیاه باشد. یا مخلوتی از هر دو باشد. ربات باید بتواند انواع مسیرهای موجود مانند پیچ، بریدگی، خطوط زاویه دار و مهم تر از همه حلقه را در کمترین زمان ممکن طی کند.
پروژه مورد نظر مشتمل بر 3 فصل، 73 صفحه، تایپ شده، به همراه تصاویر رنگی با فرمت word جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید و فصل بندی پروژه به ترتیب زیر می باشد: فصل اول به بررسی تعاریف خاصی که در زمینه رباتیک وجود دارد و همچنین موضوعات مرتبط با آن مانند تاریخچه رباتیک، انواع ربات ها، دسته بندی ربات ها پرداخته شده است. در فصل دوم کاربرد ربات ها و همچنین اجزاء ربات ها را مورد بررسی قرار داده شده و در فصل سوم، ساختن ربات مسیر یاب، شرح عملکرد ربات، توضیحات مدار و برنامه ربات و همچنین تصاویری از قطعات این ربات و تصویر ربات مسیر یاب به طور کامل قرار داده شده است...
مقدمه
فصل اول (ربات ها، تاریخچه و انواع آن ها):
- ربات
- تعاریف ربات
- علم رباتیک
- مزایای ربات ها
- معایب ربات ها
- تاریخچه ربات ها
- دسته بندی ربات ها
- دسته بندی اتحادیه ربات های ژاپن
- دسته بندی موسسه رباتیک آمریکا
- دسته بندی اتحادیه فرانسوی ربات های صنعتی
- انواع ربات ها
- ربات های متحرک
- ربات همکار
- نانوبات
- طبقه بندی ربات ها
- طبقه بندی ربات ها از نظر کاربرد
- ربات های صنعتی
- ربات های شخصی و علمی
- ربات های نظامی
- طبقه بندی ربات ها از نظر استراتژی کنترل
- نسل اول
- نسل دوم
- نسل سوم
- نسل چهارم
- طبقه بندی ربات ها از نظر محرک مفصل ها
- سیستم های الکتریکی
- موتورهای DC
- موتورهای AC
فصل دوم (کاربرد رباتها و اجزاء آنها)
- کاربرد ربات ها
- ربات آدم نمای اعلام خطر
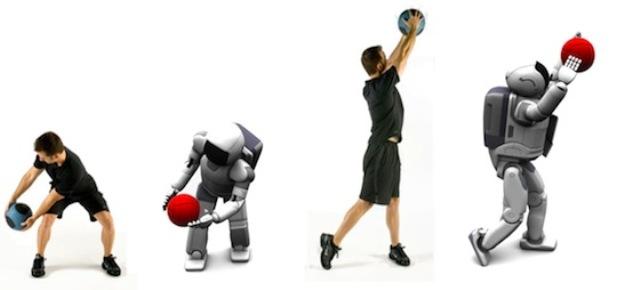
- ربات ها برای تقلید رفتار حیوانات
- ربات تعقیب خط
- ربات حس کننده تماس
- ربات آبی، برای یافتن جعبه سیاه هواپیما
- ربات پذیرش
- اجزاء اصلی یک ربات
- بازوی مکانیکی ماهر
- سنسورها
- سنسورهای بدون تماس
- سنسورهای القائی
- کنترلر
- واحد تبدیل توان
- موتور
- دسته بندی کلی موتورها
- محرک مفاصل
فصل سوم (ربات مسیریاب)
- ربات مسیریاب
- ربات مسیر یاب 7 سنسور
- شرح عملکرد ربات مسیر یاب
- ساختن ربات مسیر یاب
- مدار ربات مسیر یاب
- برنامه ربات مسیر یاب
- شکل ربات مسیر یاب 7 سنسور
منابع و ماخذ
جهت دانلود پروژه طراحی و ساخت ربات مسیریاب (هفت سنسور) بر لینک زیر کلیک نمایید:
پروژه طراحی و ساخت ربات مسیریاب (هفت سنسور)
:: موضوعات مرتبط: مهندسی رباتیک، ،










 آمار
وبلاگ:
آمار
وبلاگ: